%20(2).svg)
x
Reserve Your Humanoid
Configure your robot platform and add-ons. Our team will contact you to confirm availability, delivery timeline.
VERY LIMITED current BATCH · FIRST COME, FIRST SERVED
Oops! Something went wrong while submitting the form.
Finally, A Developer-Ready Humanoid.
Built for full-body control, manipulation research, and real-world deployment — without enterprise pricing.
LIMITED SPOTS - CURRENT BATCH NOW OPEN
Perfect for whole-body control
Our humanoid platform is designed around a full whole-body policy training pipeline, enabling robots to learn coordinated behaviors that integrate locomotion, balance, manipulation.

Rotaku

Introducing Domo
Built for whole-body policy learning, manipulation policy, embodied AI research, and scalable robot development from simulation to reality.
Long Battery Life
Up to 2 hours of continuous operation on a single charge. Fast charging reaches full capacity in just 30 minutes. Supports swappable battery packs for uninterrupted use through alternating charging cycles.
Voice assistant
Powered by advanced language models, enabling natural conversation, task understanding, and intelligent interaction. Developers can build custom skills, policy control flows, and voice-driven robot behaviors on top of an extensible AI interface.
Modular design
Built with a modular body architecture, replaceable end-effector interface, and expandable sensor system. Developers can swap between dexterous hands, grippers, and custom attachments, while adding depth cameras, LiDAR, and other perception modules for different research and application needs.
Gesture recognition
Recognizes human gestures for intuitive robot control. Use gestures to trigger actions such as auto return, navigation, walking, running, and custom interactive behaviors.
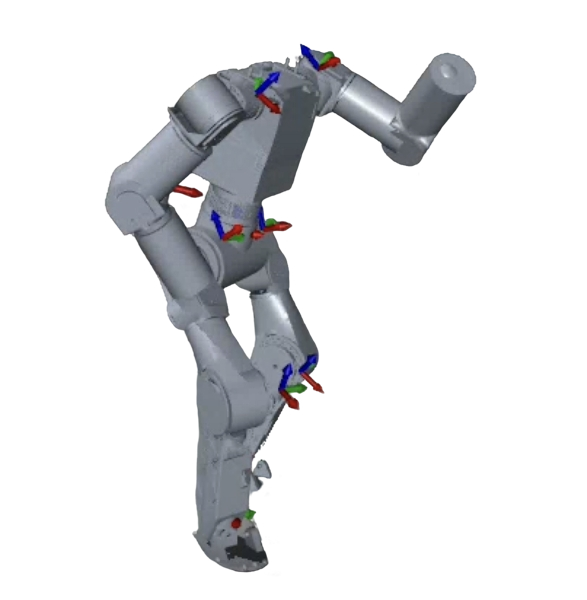
Simulation
Locomotion
policy
policy
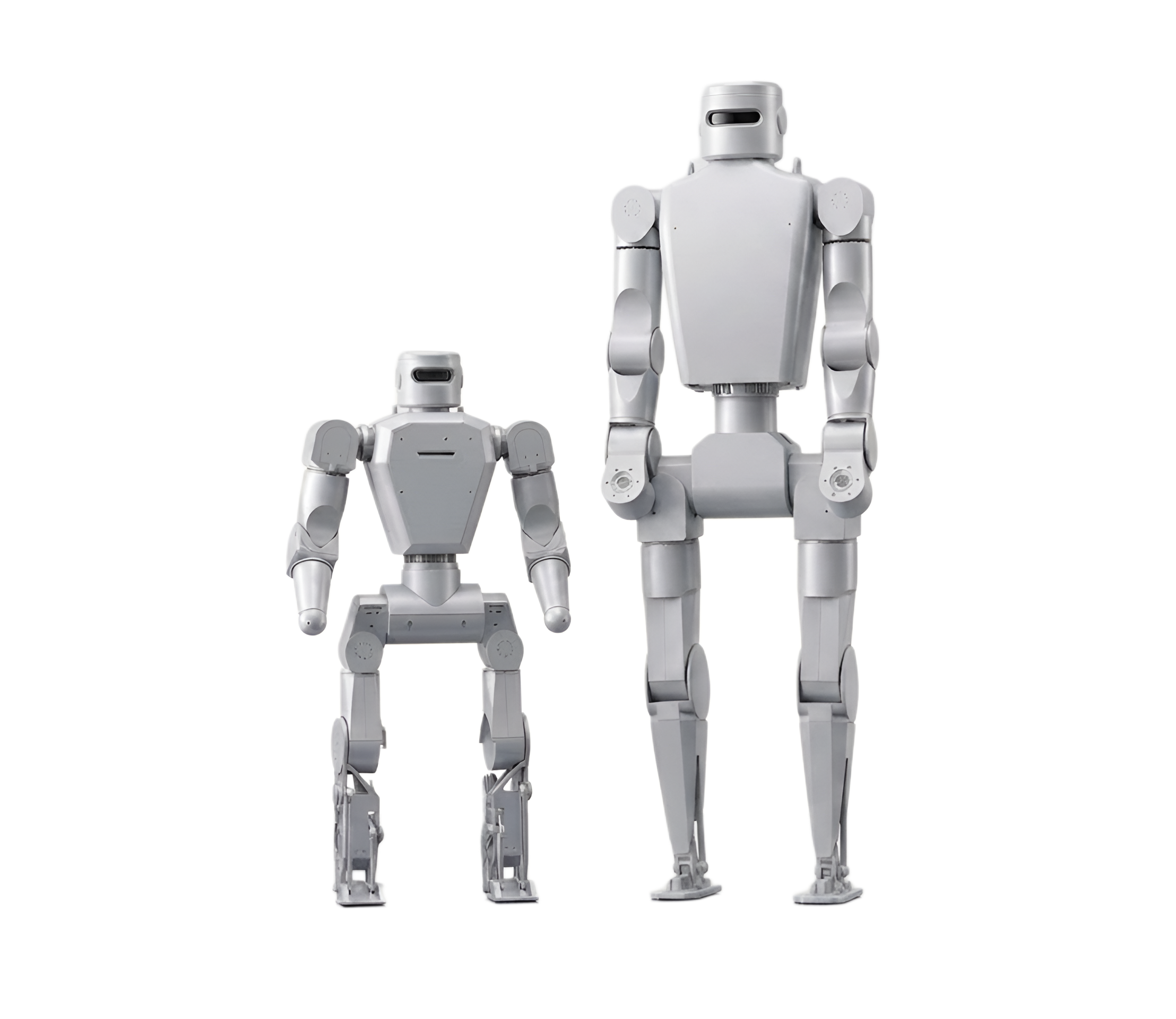
Domo
90 cm / 35.4 in
20 kg
20 kg
Domo Plus
130 cm / 51.2 in
35 kg
35 kg
Domo
23 DOF
70 Nm
70 Nm
Domo Plus
25 DOF
110 Nm
110 Nm
Modular design
Replaceable end effector
Depth Camera
Wide-FOV
Perception
Perception
Optimized Design for developers
Through extensive experimentation, we found that a lightweight body, and high-torque motors together create the ideal setup for full-body control.This balance of scale and power makes it exceptionally safe and practical — perfect for laboratories, individual developers, and startups to test control algorithms at lower cost.Its fully-metal, enclosed structural design ensures high durability and deployability, making it reliable for continuous research and real-world applications.
Scalable Data Collection
High quality data collection is the foundation of policy training.
We provide scalable pipelines for motion generation, whole body teleoperation, and manipulation data collection-built for developers and researchers.
Motion Data Generation pipeline
Convert human movement video, robot motion data to Robot format data which can be easily used in policy training
Whole-Body Teleoperation Pipeline
Use VR to control the robot with whole-body motion. The robot mirrors the operator’s movements, providing a fast and intuitive way to generate training data.

Dual-Arm Teleoperation Data Collection
Collect dexterous manipulation demonstrations through intuitive leader-arm teleoperation for grasping, handling, and real-world manipulation tasks.
Meet the Domo Lineup
Two humanoid platforms designed for developers — a compact model for rapid experimentation, and a larger, more powerful platform for advanced full-body control and research.
Domo Developer
$3,998
Developer-focused humanoid platform for full-body control research, manipulation experiments, and custom behavior development.
•
Developer SDK
•
whole-body training workflow
•
Simulation-ready with urdf support
•
and more
Domo Plus Developer
$9,899
A larger and more powerful humanoid platform for advanced full-body control, locomotion research, manipulation experiments, and high-impact demonstrations.
•
Everything in Domo Developer
•
Approx. 51 in / 130 cm humanoid hardware
•
Higher-torque actuator configuration
•
Stronger structure for dynamic motion research
•
Better manipulation and whole-body control capability
•
Better suited for labs, research teams, and advanced developers
Domo
- 23 DOF
- 120 Max torque
- Approx. 35 in / 90 cm humanoid platform
Domo PLUS
- 23 DOF
- 150 Max torque
- Approx. 51 in / 130 cm humanoid hardware
Domo Enterprise
more Advanced AI processing unit, more sensors, customizable
Real robotics. Real impact
Lorem ipsum dolor sit amet consectetur dictumst amet vitae facilisi arcu odio ut habitant vestibulum.
Our latest news
Stories from Rotaku — our progress in humanoid robotics, physical intelligence, product development, and the mission behind building robots for the world.
FAQs
How does reservation priority work?
Reservation priority is based on the order in which deposits are received. Because this batch has limited availability, submitting a deposit early gives you the best chance to secure a unit from the current production batch.Yes. This batch has a very limited number of available spots. Reservations are processed on a first-come, first-served basis, so we recommend submitting your deposit as early as possible to secure your position.A fully-enclosed aluminum body provides strong resistance to impact and long-term experimental wear.
How long does shipping take?
After your reservation is submitted, our team will confirm availability, configuration, and delivery schedule.Once fulfillment begins, delivery typically takes 2–4 weeks.
What can this humanoid robot be used for?
This humanoid is purpose-built for developers, researchers, and early-stage robotics teams. It is ideal for:
• Locomotion policy training
• Full-body control
• Manipulation research
• Teleoperation
• Vision-based policy learning
• Reinforcement learning / imitation learning
Does the robot support teleoperation?
Yes. An optional teleoperation kit enables scalable data collection for imitation learning and manipulation policies.
Does Domo need external cables to operate or run models?
No. Domo is designed as a fully untethered humanoid platform. In the shipped version, all major wiring is enclosed inside the body shell, with onboard battery, compute, sensors, and motor control integrated into the robot. Developers can connect to Domo wirelessly, deploy and run models onboard, and access the system through SSH for development, testing, and debugging — without relying on external control cables during operation.
How durable is the robot?
A fully-enclosed aluminum body provides strong resistance to impact and long-term experimental wear.
Copyright © Robotflow | Designed by BRIX Templates - Powered by Webflow